 Moshe Shoham
Moshe Shoham
580 California St., Suite 400
San Francisco, CA, 94104
2000, Journal of Dynamic Systems, Measurement, and Control
Transactions of the ASME® Dynamic Systems and Control Division Technical Editor, A. GALIP ULSOY Past Editors, W. BOOK M. TOMIZUKA DM AUSLANDER JL SHEARER KN REID Y. TAKAHASHI MJ RABINS Associate Technical Editors, Y. CHAIT „2002… F. CONRAD „2001… E. FAHRENTHOLD „2001… S. FASSOIS „2001… Y. HURMUZLU „2001… R. LANGARI „2002… E. MISAWA „2002… S. NAIR „2001… N. OLGAC „2001… C. RAHN „2002… S. SIVASHANKAR „2002… J. TU „2002… P. VOULGARIS „2001… Book Review Editor A. GALIP ULSOY Executive ...














![Application of the Passivity Theorem. Using the notion of multipliers [2], the feedback systems shown in Fig. | are equiva- lent from the point of view of stability. The passivity theorem states that if G is passive and H is strictly passive then r eL,=yeL,. Using Lemma 1 and the passivity theorem, the original system is stable if either H= Y, TH or H= HY, is strictly passive. A possible design strategy would select H,,, a strictly Therefore G(s) is passive if and only if w<* When «= p*, the summation over the vibration modes vanishes (all vibration modes become unobservable) and the output p,,+=C,i7, becomes propor- tional to the rigid body modal rate. It 1s instructive to consider a small negative rate feedback u(t) = — ep,,. Using a simple eigen- value perturbation argument, it is readily shown that the closed- loop eigenvalues of each vibration mode are given by —€Y Cr lratja- All modes are stabilized when u<p* (Y, >0) and all of them are destabilized when p> (Y ,<0) as- suming controllability and observability, i.e., ¢.,#0.](https://figures.academia-assets.com/68067948/figure_015.jpg)


![The noncollocated degree of freedom is taken to be p,.= 03= 9 +[1 1]q, so that C,=1, C,=[11]. The collocated degree o' freedom is p.o= 9, and p,=wA,;+(1—) 4. If g-=6,, de) = 92.— 9, and g,.= 03— 9» are selected as gen- eralized coordinates and f(t) as the motor torque, the matrices defined in Eq. (2) are given by](https://figures.academia-assets.com/68067948/figure_018.jpg)








![Fig. 4 Simulation results for x(0)=[0 0.71 0.71]? and B=0.79, 2.29, and 3.23 conditions is a limited number of points in state space, it is pos- sible to obtain 6,,, quite accurately. The accuracy is determined by the size of the change in the parameter 8 used when searching for Boot -](https://figures.academia-assets.com/68067948/figure_026.jpg)


















![The two dynamical Eqs. (12) complete the transformation from the state [x1(1),....x,(D ]7 to the state [21 (1),.--5Z,—1(t),e1(t),e2(t)]’.. With implicit symbol defini- tions, system (12) can be rewritten as The idea is now that of steering both e,(ft) and the unmeasurable (ft) to zero (to attain the sliding regime on S(t)=S(t)=0) ina finite time, that is, a second order sliding mode control problem has to be solved. In Bartolini et al. [26], it has been proved that, by analogy to the well-known solution to the time optimal control problem, the control u(t) can be chosen as a bang-bang control switching be- tween two values — Uy, and +Uy,,. The classical switching logic for a double integrator (H(e,(t), e2(t))=0, Bj, =B,=1) is](https://figures.academia-assets.com/68067948/figure_045.jpg)









![Fig. 1 Schematic diagram of direct-drive robot As shown in Fig. 1, this study constructs a three-axis R— 6 —Z direct-drive robot manipulator, where the first link is driven by a NSK Megatorque motor [14], the second by a NSK Mega- thrust motor, and the third by an electrothrust motor together with ball screw.](https://figures.academia-assets.com/68067948/figure_057.jpg)











![and where use was made of the definition of E(x) and of the fact that po;#0, ie J,. Next consider the matrices [[9(x) Ao(x)] and [T,(x) A,(x)] defined as](https://figures.academia-assets.com/68067948/figure_069.jpg)





![Space station dynamics: Journal of Dynamic Systems, Measurement, and Conirol NE Rg OE Ley © Example 5.4. The nonlinear equations of motion of the space station rotating in circular orbit with constant orbital rate, in terms of components along the body-fixed control axes can be written as [28]](https://figures.academia-assets.com/68067948/figure_076.jpg)
![Assuming a constant orbital rate and differentiating (5.5), we obtain Solving (5.3) with respect to the vector [w, w w3]|, we obtait](https://figures.academia-assets.com/68067948/figure_077.jpg)




















![In principle, given geometric measurements z at 4n locations (y,y) on the part surface, and the respective predictions z of the deposition model from Eq. (8), the resulting deviation values can be used in Eq. (10) to form a linear system of 4n equations, to be solved for the deposition parameter changes (Du; ,Dv;,Dw;,Dr;),i=1...n. Notice that in order to obtain such a well-conditioned system of equations for robust parameter identification, sufficiently rich data must be obtained at respective 4n positions (y,), located close and scattered around the current material deposition region. In the vicinity of the mass source (X,Y), however, real-time measurements, e.g., by mechanical pro- filometry or optical scanner sensing, are technically problematic because of the material deposition interference with the sensor. Moreover, the precision of the geometry model is challenged by the variable source influences, due to the dominating surface ten- sion assumption. For this reason, in-process geometry measure- ments at m locations are conducted on the solidified surface at a safe distance behind the mass source, as explained below. On the basis of these m measurements, the 4n deposition parameter changes are evaluated by a least-squares identification technique (Astrom and Wittenmark [24]). This method minimizes a qua- dratic index *e(t) of the deposition error ¢ values at the m mea- surement locations, analogous to that of Eq. (6). The resulting corrections Du;,Dv;,Dw;,Dr;,i=1...n, are subsequently used every time period Dt to update the deposition field param- eters u;,U;,W;,r;, to their new values u;+Du;,v;+Dv;,w; +Dw;,,r;+Dr;. identify the parameters (u; ,v; ,w;,7;) of the composite deposition field approximation Z, Eq. (5). For this purpose, Eq. (9) can be rewritten over the full process duration ¢, as a linearized expres- sion of the deviation field ¢ sensitivity on the parameter variations Dy. Dn. Dw. Dr. j=1.. 2 -n-](https://figures.academia-assets.com/68067948/figure_097.jpg)


























































![Fig. 1 The proposed ER damper: (a) Schematic configuration; (b) photograph Here E is the electric field. The a and @ are intrinsic values of the ER fluid to be experimentally determined. In this study, for the ER fluid, the commercial one (Rheobay, TP Al 3565) is used and its yield stress at room temperature is reported by 591E!“? Pa [7]. Here the unit of E is kV/mm. It is herein noted that the Bingham model of the ER fluid [8] is adopted for the derivation of Eqs. (1) and (3).](https://figures.academia-assets.com/68067948/figure_150.jpg)





![Table 1 Parameters of the full-car ER suspension system rithm to the ER damper. Then, the damping force of the ER damper is measured from the hydraulic damper tester and the measured damping force is fed back into the computer simulation. In short, the computer simultaneously runs both the hydraulic damper tester and high voltage amplifier during simulation loop, and the computer simulation is performed based on the measured data. In this study, the ER damper at rear right side is chosen for the HILS by considering the capacity of the hydraulic damper tester. (=0.856 m/s). The second type of road excitation, normally used to evaluate the frequency response, is a stationary random process [14] with zero mean described by](https://figures.academia-assets.com/68067948/table_014.jpg)



![Let us for simplicity define the time dependent gas velocity of the inlet port, v, (x,,)=v,.. The inlet port gas velocity, v,, can be approximated (Broome [16], Moraal et al. [13]) by the solution to a second order forced differential equation with known initial values:](https://figures.academia-assets.com/68067948/figure_159.jpg)




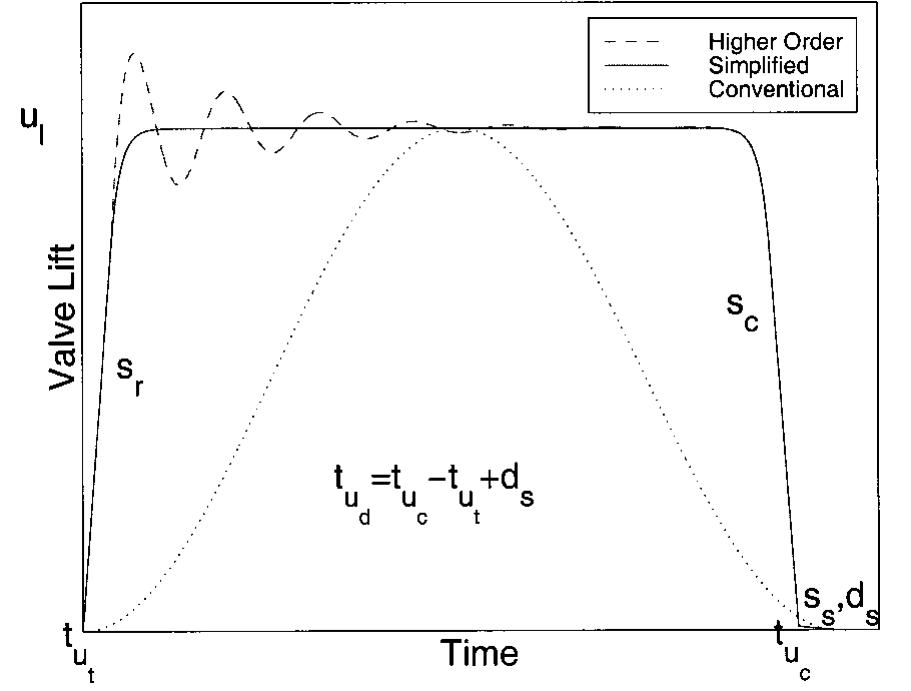

![Fig. 6 Model (dashed line) versus experimental data (solid line) at 1500 rpm The model described in this paper was evaluated using experi- mental data for a 4-cylinder engine (Moraal et al. [13]) during wide open throttle operation. The valves of the experimental en- gine are cam-driven, therefore, the intake valve profile is the con- ventional sinusoidal profile with the following specifications: (i)](https://figures.academia-assets.com/68067948/figure_166.jpg)

![Fig. 8 Model (dashed line) versus experimental data (solid line) at 4000 rpm In Figs. 6, 7, and 8 we compare the model with the actual engine data for wide open throttle (f in Eq. (15) is fixed to 90 deg) and engine speeds of 1500, 3000, and 4000 rpm, respec- tively. The manifold and cylinder pressures are plotted for the model (dashed curve) and the experimental engine (solid curve). The model Helmholtz resonator parameters were determined as w,=27*176, €,=0.005 for an engine speed of 1500 rpm, and w,=27*190, €,=0.15 for engine speed of 3000 and 4000 rpm. These values are similar to the ones identified in (Moraal et al. [17]).](https://figures.academia-assets.com/68067948/figure_168.jpg)


![The input-output behavior is derived for fixed intake valve tim- ing, u,, and parametrically varying intake valve maximum lift u, and duration uw, in the crankangle-domain model. We fix u, to zero degrees ATDC, because neither advancing nor retarding u, affects the performance variables in a favorable way (Ashhab et al. [11]). This result is in agreement with the work of Miller et al. [20] where uw, was set to zero at all loads and medium engine speed. Note, that by setting u,=0 deg ATDC, valve closing is approximately equal to the valve duration. The input-output mean-value model can now be described by a static nonlinearity that is identified by fitting data attained by simulation, and a de- lay:](https://figures.academia-assets.com/68067948/figure_170.jpg)

![Fig. 11 Investigation of the effects of the higher order inertial and acoustic dynamics to the mean-value model at an engine speed of 1500 rpm Figure 12 shows the discrepancy between the two models for 6000 rpm. At high engine speed, Helmoltz resonator dynamics increase the cylinder air charge during late intake valve closing (ram effect as in Broome [11]). This is achieved with no adverse effect in specific pumping losses. For early valve closing, how- ever, Helmholtz resonator dynamics reduce the cylinder air charge and increase the pumping losses. To explain this behavior we plot part of the P-V diagram for three different intake valve closing timings in Fig. 13. Specifically, Fig. 13 shows the P-V diagrams for early (IVC=80 deg), at the event (IVC=180 deg), and late](https://figures.academia-assets.com/68067948/figure_172.jpg)
















![Fig. 10 Nominal engine tracking Fig. 11 Air charge regulation during engine speed changes The control signals (uz and u,) are shown in subplots 2 and 3. The control signals for the four cylinders are identical because the cylinders are balanced. The step changes in the demanded cylin- der air charge forces the feedforward controller to switch between the branches of the ‘‘L’’ shape (see Section 3). In the first engine cycle (t=[0,0.08]), the value of m**’ is larger than the critical air charge (m,,) and thus the feedforward controller selects u, =7 mm (subplot 2) and computes the corresponding u,= 134 deg (subplot 3) that satisfies m“°’. The small difference between the desired and individual cylinder air charge is due to errors in the curve fitting used in the feedforward controller. The closed-loop controller algorithm balances the four cylinders within three en- gine cycles. The next value of m** is less than m,,. Thus, the feedforward controller selects u,z=80 deg (subplot 3) and com- putes u;= 1.36 mm (subplot 2) that satisfies m“*’. As the desired](https://figures.academia-assets.com/68067948/figure_189.jpg)



![The details are omitted here because of the journal page constraints; see Wang et al. [11] for an outline of the main steps. After extensive calculations, employing MATHEMATICA to solve integrals in closed form,* the compressor model becomes](https://figures.academia-assets.com/68067948/figure_193.jpg)












![For a cubic characteristic, these conditions have already been re- vealed by Krener [14]. Since these conditions involve not only the shape parameters S$, and S, of the compressor characteristic but also the value of pressure at the peak, 2+W eo, we are of the opinion that controller (23), in which I’ is the bifurcation param- eter, is preferable to the controller (98). where yo is a set point/disturbance parameter and the gains kp, kp, ky, and kq are required to satisfy For right-skew compressors, for which S,;>0 and S,<0, the conditions (99)—(101), in particular, allow controllers of the fol- lowing types:](https://figures.academia-assets.com/68067948/figure_204.jpg)












![The Q model is used when transmission lines are connected together or to fluid volumes (e.g., hydraulic cylinder) by compo- nents of negligible volume such as directional control valves (Fig. 2). Such connectors are modeled as orifices as in Piché & Ellman [18] and Ellman and Piché [19]. The Q-model transfer functions are A 4-mode SIMULINK realization of the Q model is shown in Fig. 3.” Implementation in other simulation environments should be straight forward. Because the models are decoupled, the model has an obvious parallellization. The approximate transfer function (59) are rational polynomials thus inverse Laplace transformation can be calculated giving constant coefficient ordinary differential equations. For ODE-based simulators the following state space realization can be used (with n modes):](https://figures.academia-assets.com/68067948/figure_215.jpg)




![The PQ model is used when the connections at the ends of the transmission line are of different types. One end can be connected to an orifice and the other directly to a volume. The PO-model transfer functions are The P model is used when transmission lines are connected together to fluid volumes by components of negligible resistance (Fig. 4). Such connectors are modeled as hydraulic volumes (Piché and Ellman [7]). The P-model transfer functions are](https://figures.academia-assets.com/68067948/figure_218.jpg)





![Fig. 7 Water hammer example pressure response at valve for first cycle of water hammer in high-viscosity oil Table 4 The physical properties of water hammer system in Sl units (Holmboe and Rouleau [20])](https://figures.academia-assets.com/68067948/figure_224.jpg)
![Substituting the Ritz approximation into Eq. (70) and simplifying yields the ordinary differential equation system of second order Equations (66a) and (66b) do not include frequency dependent friction effect, since the equations are one-dimensional. Equations (71)—(73) can be modified to include frequency dependent friction effects (2D friction), if we assume that for small flow rate and pressure perturbations the turbulence flow behave the same way as laminar flow. This assumption is related to turbulent mean flow condition in Trikha, [12]. Comparing the Q model (59) and Eq. (72) and (73) we can modify the matrices as follows (2D friction):](https://figures.academia-assets.com/68067948/figure_225.jpg)

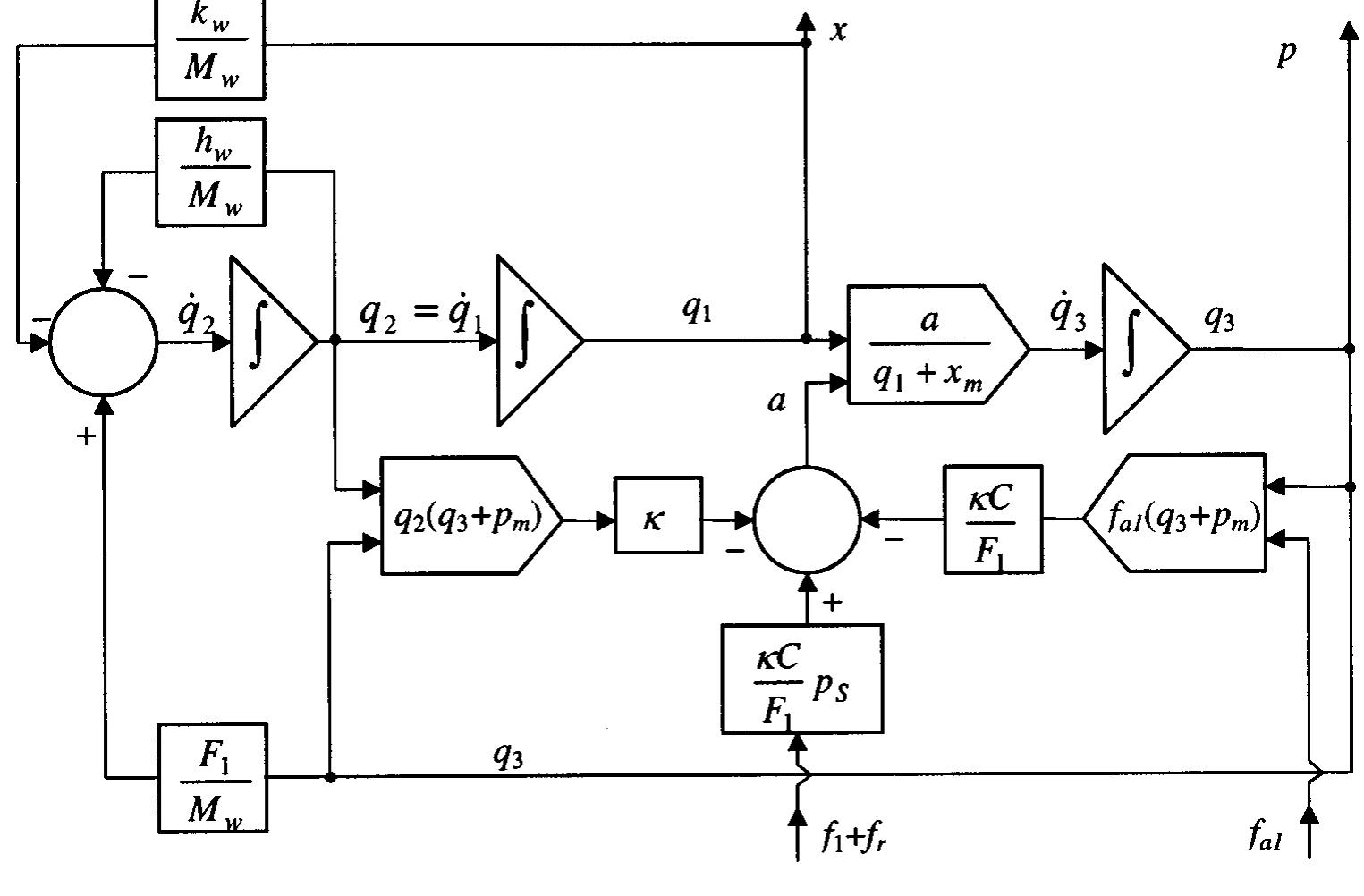
![Fig. 1 Diagram of a pneumatic vibration exciter It was experimentally found that in real flow conditions present in a working generator temperature changes can be omitted and Pressure p,, controlled by valves f; and f,,, mainly depends on the quantity of air mass in chamber V,. Changes in the chamber volume caused by piston vibrations have little effect on pressure P1, in the open chamber and air stiffness in such a chamber is, inter alia, dependent on frequency w and is smaller than in the closed chamber [1]. The component of pressure function pj, re- sulting from varying volume of chamber V, is a feedback signal in the generator. When the feedback is compensated, changes in the chamber volume do not cause the air pressure in this chamber to change, thus the air temperature remains unchanged, too. This leads to a conclusion that the air temperature 7, in chamber V, depends mainly (or exclusively after feedback compensation) on air flow processes. _ «2 a el oe In ee](https://figures.academia-assets.com/68067948/figure_227.jpg)

















![Fig. 8 Unsteady flow rate measurement with the isothermal chamber (f=5 [Hz])](https://figures.academia-assets.com/68067948/figure_246.jpg)
![Fig.9 Unsteady flow rate measurement with isothermal cham- ber (f=40 [Hz])](https://figures.academia-assets.com/68067948/figure_247.jpg)
![Fig. 10 Unsteady flow rate measurement with the normal chamber (f= 40 [Hz])](https://figures.academia-assets.com/68067948/figure_248.jpg)


![Fig. 3 Frequency responses of the servovalve The experimental system consists of a Moog servovalve utiliz- ing a cantilever feedback spring and a 0.9 kg double-ended actua- tor with an effective area of 3.613 e * m? (0.56 in’). The supply pressure is 18.6 MPa (2700 psi). Mobil DTE Light oil is used at an average temperature of 90°F. The actuator and spool are con- nected to linear variable differential transducers (LVDT) with +3 mV noise level. The range of the actuator LVDT is +2.5 V for the total stroke of 0.0254 m (+1 in). While the servo valve physical parameters are not available for model verification, the experi- mental frequency responses for the servovalve and the actuator are measured with a signal analyzer, using a ‘“‘swept sine’’ method that generates fixed-amplitude sine waves of varying fre- quencies. This is then used to validate the model order and struc- ture. It is desired to measure this data near the equilibrium actua- tor position x,,=0. Since the actuator is of type 1 as Eq. (22) indicates, it is difficult to keep the actuator near the equilibrium position in open loop. Therefore, a proportional control loop (gain= 1) is used to create a stabilized plant, as shown in Fig. 2. With different input amplitude levels (15 mV, 30 mV, and 50 mV), the frequency responses of the servovalve and actuator are measured and shown in Figs. 3 and 4, respectively. Using the frequency responses from the three input amplitudes, an averaged frequency response is computed for the servovalve and the actua- tor, and nominal models are fitted through the use of an equation- error method [17].](https://figures.academia-assets.com/68067948/figure_251.jpg)


















![(II): r(k)=0 since S(q~')y,e(k)=0. Also since ||¢(k)|| is bounded from (I), we have D(k) €1,5D €1,>D(k)—0. With X=max(A.Ay), (A2) and (A3) imply that The RHS of the above inequality is nondecreasing. Provided that e<X(1—X)/(k,||v|]) we have Further, § has no common factor with B, by assumption, there exist polynomials 7 and A, such that yS+AB,=1. Therefore, xSu+ABu=u and xi+A(A,y—C,d)=u. Therefore u(k) is bounded since the left hand side of the above is bounded. Since || @(n)||Skgl|x(n)|| and D(n) €1,, by the discrete form of the Bellman-Gronwall’s lemma (see Lemma 3), ||x(k)|| is bounded. Therefore # and y are bounded.](https://figures.academia-assets.com/68067948/figure_270.jpg)






























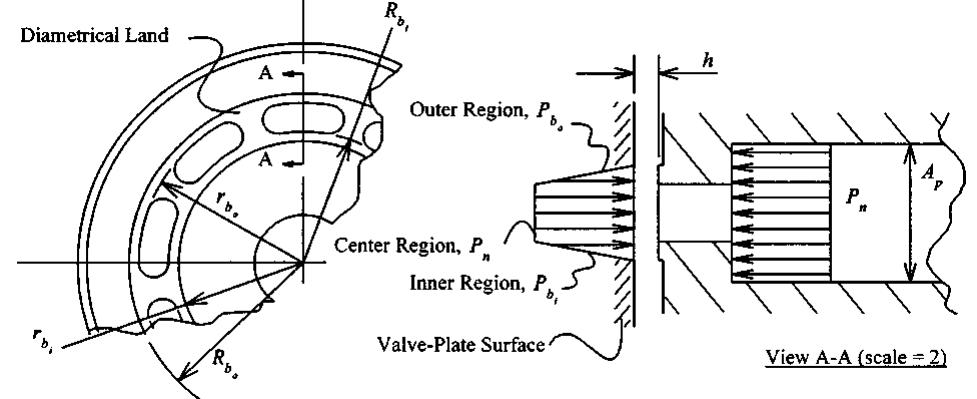
![Fig. 1 Cylinder head arrangement of a digital-displacement pump-motor Figure 3 shows a schematic representation of a motoring cycle [4]. To enable a cylinder for motoring the controller closes the low-pressure valve shortly before the piston reaches the top-dead- center (TDC). Once the valve is closed, the cylinder pressure rises to equal to that of the high-pressure manifold by the time it reaches TDC. The high-pressure valve can then be opened and latched. The piston is then propelled by the fluid pressure toward BDC. In a similar fashion to the TDC valve-sequence, the high- pressure valve is closed prior to BDC such that the residual piston stroke can de-pressurize the cylinder and allow the low-pressure](https://figures.academia-assets.com/68067948/figure_300.jpg)






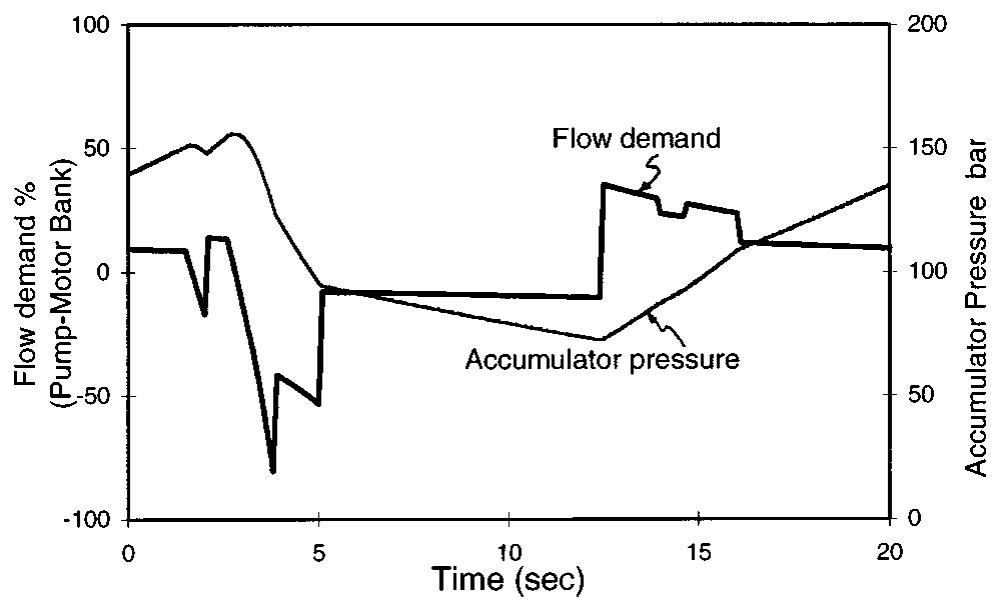
![The digital-displacement technology has advanced in the last few years both in terms of compu ter simulation and the building of prototypes. The first prototype of a six-cylinder pump was built in 1990. The single cylinder pump-motor prototype (1994) was followed by a six-cylinder axial pump-motor (1996). Figure 13 shows a photograph of the various components used for a six- cylinder radial pump-motor whic writing. Experimental work has simulations, some of which have Figure 14 shows the experimenta motor, running at 1500 rpm und h is under test at the time of shown good agreement with already been published [3,4]. results of a 6-cylinder pump- er pressure-control mode. The pressure is held constant (about 70 bars) while the pump flow follows an increase from 10 to 90 percent of the capacity in about 30 ms. The experimentally measured response time of the digital- Fig. 9 Power requirement of the pump-motor bank](https://figures.academia-assets.com/68067948/figure_307.jpg)





















![Fig. 3 Following a discontinuous wall: real (solid line) and es- timated (dashed-line) robot trajectory where g is a positive threshold value, P,(k|k) is an estimate of the covariance matrix of the state (used by the EKF) and Xx (k|k—1) is the time update of the EKF. Moreover, [F(k) — G(X(k|k- 1))] will produce incorrelated time series. On the other hand, if the model is wrong, both the aforementioned conditions will fail. Henceforth, by including the test (23) and the correlation test in a higher level controller, it is possible to perform a wall-following task of discontinuous profiles, by alternatively selecting whether to use the environmental model information to get better estimates of the robot position, or to upgrade the model itself. Figure 3](https://figures.academia-assets.com/68067948/figure_331.jpg)



![By LaSalle’s theorem [7], the tracking errors e; and e4 converge to zero globally. In addition, if the condition of persistent excita- tion is satisfied, the parameter estimate will converge to its true value.](https://figures.academia-assets.com/68067948/figure_336.jpg)









![Differentiating J with respect to K (see p. 592 of [15]), we obtain the optimum value of K.](https://figures.academia-assets.com/68067948/figure_346.jpg)



![-ig. 3 Phase portrait for the unperturbed system Let us consider the system in Eq. (8), where the parameters have been set as follows [3]:](https://figures.academia-assets.com/68067948/figure_350.jpg)






